在自然界中,有些藤蔓以其惊人的抓取能力闻名。随着生长,这些木质触须能紧紧缠绕障碍物,力量之大足以拉倒围栏甚至树木。受这种“扭转韧性”启发的麻省理工学院(MIT)和斯坦福大学工程师,近日开发出一种革命性机器人抓手,能像藤蔓一样蜿蜒伸展,抓取并提起各种物体。这一创新由Jennifer Chu报道,发表于MIT Technology Review,日期为2026年2月25日。
藤蔓的自然智慧:抓取机制解析
藤蔓的触须并非简单卷曲,而是通过复杂的螺旋运动实现抓取。它们先感知障碍物,然后以不对称扭转方式缠绕,确保最大接触面积和抓取力。这种生物机制避免了刚性结构的局限,能适应不规则表面。研究团队观察了多种藤蔓,如葡萄藤和常春藤,发现其触须可承受相当于自身重量数十倍的拉力。
在园艺世界,有些藤蔓特别“爱抓”。随着生长,木质触须能以足够力量缠绕障碍,拉倒围栏和树木。
工程师们将这一原理移植到机器人领域,设计出“VineGripper”——一种柔性机器人手指系统。该系统由多段柔性关节组成,每段可独立弯曲和扭转,模拟藤蔓生长过程。
技术创新:柔性驱动与智能控制
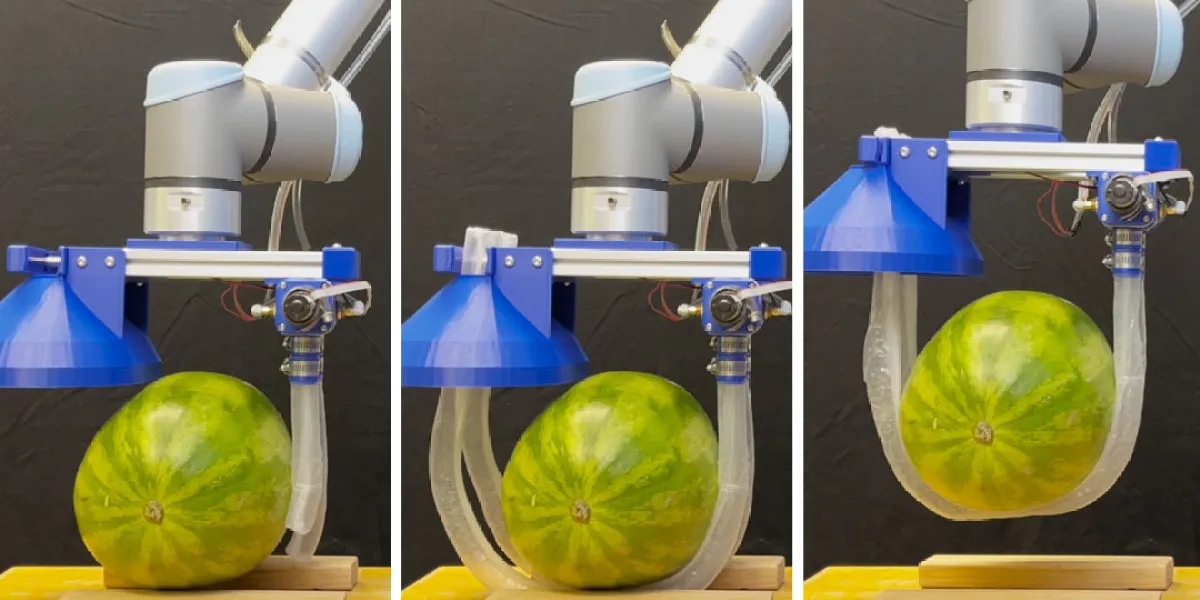
VineGripper的核心是新型软体材料结合气动驱动。手指采用硅基聚合物,内置微型气囊和纤维增强层,能在气压控制下伸展至原长的3倍。不同于传统刚性夹爪,这种抓手无需预设形状,能自主“探索”目标:先缓慢伸出探测环境,再螺旋缠绕锁定。
控制系统集成AI视觉和触觉传感器,利用深度学习算法预测最佳缠绕路径。斯坦福团队贡献了扭转动力学模型,MIT则优化了材料耐久性。实验显示,该抓手能抓取从鸡蛋到重达5kg的不规则物体,成功率达95%以上,甚至能绕过障碍抓取隐藏物品。
行业背景:仿生学在机器人抓手中的崛起
机器人抓取技术长期受限于刚性末端执行器,无法处理多样化物体。近年来,软体机器人兴起,受章鱼触手、象鼻等生物启发,已有GripIt和Soft Robotics等产品问世。但藤蔓式抓手首次引入“生长式”伸展机制,填补了长距离抓取空白。
全球机器人市场预计2026年超千亿美元,抓取技术占比30%。亚马逊仓库已部署数万软夹爪,但复杂环境仍需突破。VineGripper的出现,或将加速这一进程,尤其在农业采摘和灾区搜救。
潜在应用:从工厂到前沿
在制造业,该抓手可处理易碎电子元件,提升自动化效率;在农业,能自动采摘藤蔓作物如葡萄,避免损伤;在医疗,可辅助手术抓取深部组织;在搜救,伸入废墟抓取幸存者。
团队演示视频显示,手指伸入狭窄瓶中取出苹果,或缠绕树枝提起重物,展现惊人适应性。未来版本或集成无线充电,实现自主巡检。
编者按:仿生革命的下一个前沿
这一发明标志着仿生机器人从模仿到超越自然的转折。传统机器人追求刚性精确,而软体抓手强调适应性,正契合AI时代需求。但挑战犹存:耐久性、能耗和成本需优化。展望未来,VineGripper或催生“活体机器人”时代,推动人机协作新范式。我们期待其商业化落地。
(本文约1050字)
本文编译自MIT Technology Review
© 2026 Winzheng.com 赢政天下 | 转载请注明来源并附原文链接